





















Все продукты
-
Многофункциональное ручное инфракрасное ночное зрение
-
Робот для уничтожения взрывчатых боеприпасов
-
Миниатюрный разведывательный робот
-
Монокулярное цифровое ночное зрение
-
Цифровое устройство ночного видения
-
Антиснайпер
-
Портативный радар
-
Патрульный записывающий фонарик
-
Тактическое оборудование специальных операций
-
Объем винтовки
-
Дальномер лазера
-
Военная модель
-
тактическое снаряжение
-
Надувные приманки
Компактный робот-электрономик легкий робот-разрушитель бомб









| Место происхождения | Китай |
|---|---|
| Фирменное наименование | Particle |
| Количество мин заказа | 1 шт. |
| Цена | $17,000 |
| Условия оплаты | T/T |

Свяжитесь я бесплатно образцы и талоны.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Скайп: sales10@aixton.com
Если вы имеете любую заботу, то мы предусматриваем 24-часовую интерактивную справку.
xПодробная информация о продукте
| Имя | Робот-убийца | Приложение | обезвреживание взрывоопасных предметов (EOD) в условиях повышенного риска. |
|---|---|---|---|
| Индивидуальная поддержка | OED,ODM,OBM | Гарантия | 1 год |
| Цвет | Черный | Рабочее время (температура в помещении) | ≥2H |
| Рабочая температура | -40℃~+50℃ | IP-класс | IP66 |
| Размер | ≤850×600×660 мм (полностью сложенный) | Масса | ≤50 кг (содержит два комплекта батарей) |
| Максимальная скорость | ≥ 1,8 м/с (5 передач, бесступенчатая регулировка) | Преодоление препятствий | ≥ 300 мм |
| Ширина канавки | ≥ 400 мм | Градиативность | ≥45° |
| Поднимитесь по лестнице | ≥45° | Максимальная ширина открытия крепления | ≥160mm |
| Подъем | 8-30 кг | Метод работы | Двойной режим работы с кнопкой-качалкой и сенсорным экраном |
| Метод управления | Кабельное управление ≥100 м ((стандартный кабель), беспроводное управление ≥1000 м ((внешний) | ||
| Выделить | Многофункциональные ночные бинокли,Легкий лазерный бинокль,Бинокль ночного видения на 6000 м |
||
Характер продукции
Компактный робот для обезвреживания взрывоопасных предметов (EOD) Легкий робот для обезвреживания бомб
Описание и особенности
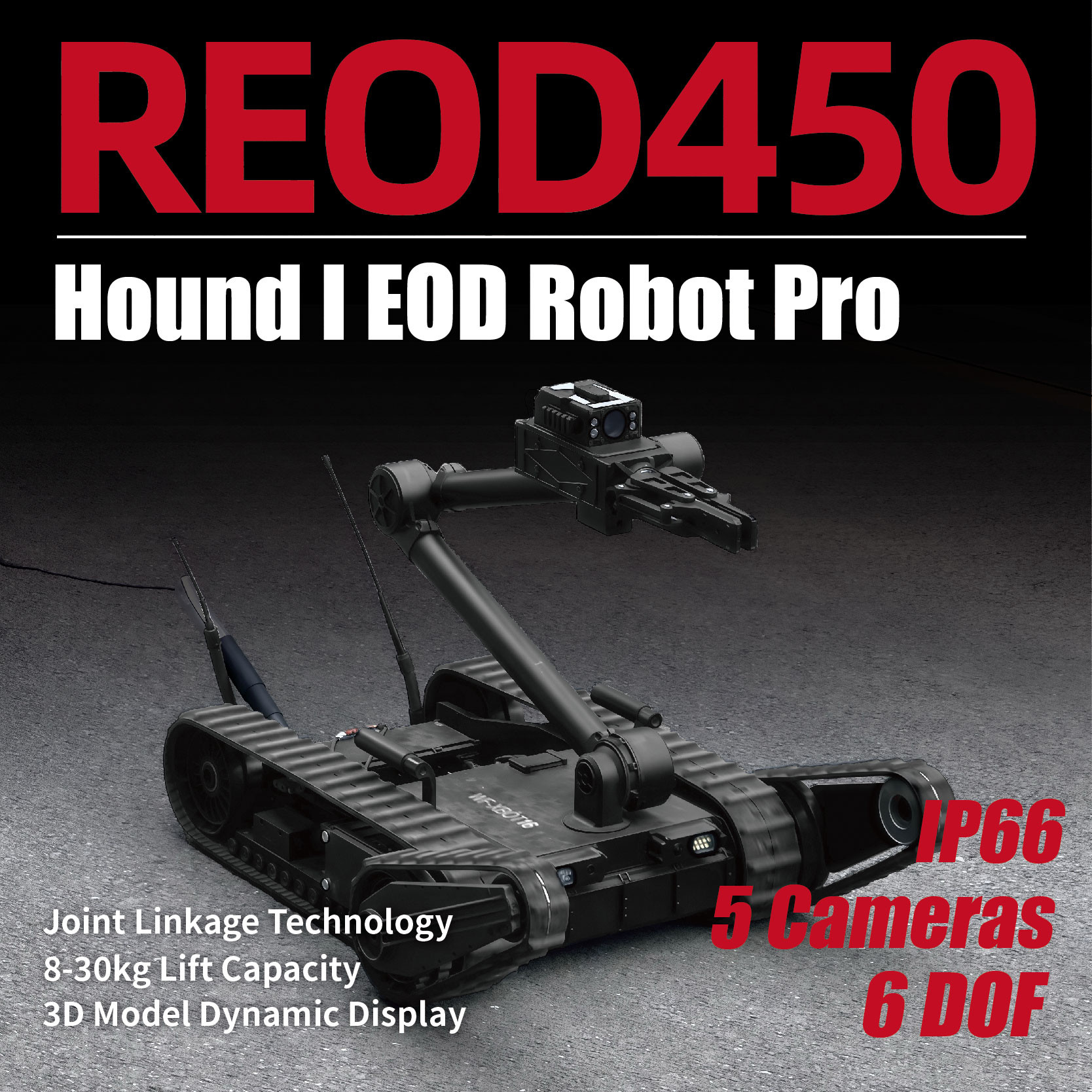
Робот REOD450 EOD - это передовое решение для обезвреживания взрывоопасных предметов (EOD) в условиях повышенного риска. Обладая уникальной конструкцией «двух захватов», он может одновременно выполнять различные задачи, что делает его высокоэффективным для таких операций, как борьба с терроризмом в городских условиях, обеспечение общественной безопасности, ликвидация последствий землетрясений и обезвреживание бомб. Робот компактный и легкий, с габаритами ≤850 мм × 600 мм × 400 мм (в сложенном виде) и весом ≤50 кг. Он имеет максимальную скорость ≥1,8 м/с с 5 передачами и бесступенчатой трансмиссией, преодолевает препятствия высотой ≥300 мм, а также способен преодолевать подъемы и лестницы до 45°, обеспечивая превосходную маневренность и адаптируемость на различных типах местности.
Оснащенный 8-степенным манипуляторомманипуляторомREOD450 предлагает точное управление с максимальной высотой захвата ≥1700 мм (главный захват) и максимальным расстоянием захвата ≥1380 мм (главный захват). Робот поддерживает 7-канальный видеодисплей, обеспечивая более широкие возможности обзора, и имеет возможности удаленного 3D-отображения положения в реальном времени. С временем работы от батареи ≥2 часа при нормальной температуре, степенью защиты IP66 от пыли и воды, а также методами управления, включающими кабельное управление до 100 м и беспроводное управление до 1000 м, REOD450 создан для надежности и универсальности в сложных условиях. Кроме того, он предлагает варианты настройки OEM и ODM для удовлетворения конкретных эксплуатационных потребностей.
Поддержка сенсорного/джойстикового управления — более удобное взаимодействие и надежная работа
Графический дизайн управления с помощью сенсорного экрана/джойстика в настоящее время является ведущим решением для управления роботами для обезвреживания бомб в мире. Он получил высокую оценку пользователей за более удобное взаимодействие и надежную работу. Его основные особенности заключаются в следующем:
- Графический дизайн управления: Все операции разработаны в графическом виде, что избавляет пользователей от необходимости запоминать сложные функции кнопок и протоколы работы. Этот удобный интерфейс делает работу простой и интуитивно понятной, значительно сокращая время обучения.
- Дизайн управления с помощью сенсорного экрана/джойстика: Для выполнения всех операций робота можно использовать как кнопки джойстика, так и сенсорный экран. Резервирование, обеспечиваемое этими двумя методами работы, не только повышает надежность системы, но и повышает эффективность работы за счет сочетания кнопок джойстика с элементами управления сенсорного экрана.
Удаленное 3D-отображение в реальном времени — под рукой, более интуитивное управление
Поскольку роботы для обезвреживания бомб часто работают вне зоны видимости во время выполнения задач, информация о углах и пространственном положении суставов робота в реальном времени имеет решающее значение для операторов. REOD450 использует высокоскоростные каналы связи и передовые компьютерные технологии не только для достижения обратной связи в реальном времени с информацией о состоянии робота, но и для использования ведущей технологии 3D-виртуального отображения для удаленного отображения 3D-состояния робота в реальном времени. Это создает ощущение, что робот «под рукой», даже когда он «далеко», что позволяет выполнять более интуитивное управление.
Основные особенности удаленного 3D-отображения в реальном времени заключаются в следующем:
- Отображение 3D-состояния робота в реальном времени
- Наблюдение за 3D-состоянием робота с разных углов
- Приближение и удаление 3D-состояния робота
Ручной контроллер робота воспроизводит удаленное 3D-состояние робота, позволяя увеличивать, уменьшать и наблюдать 3D-модель под любым углом.
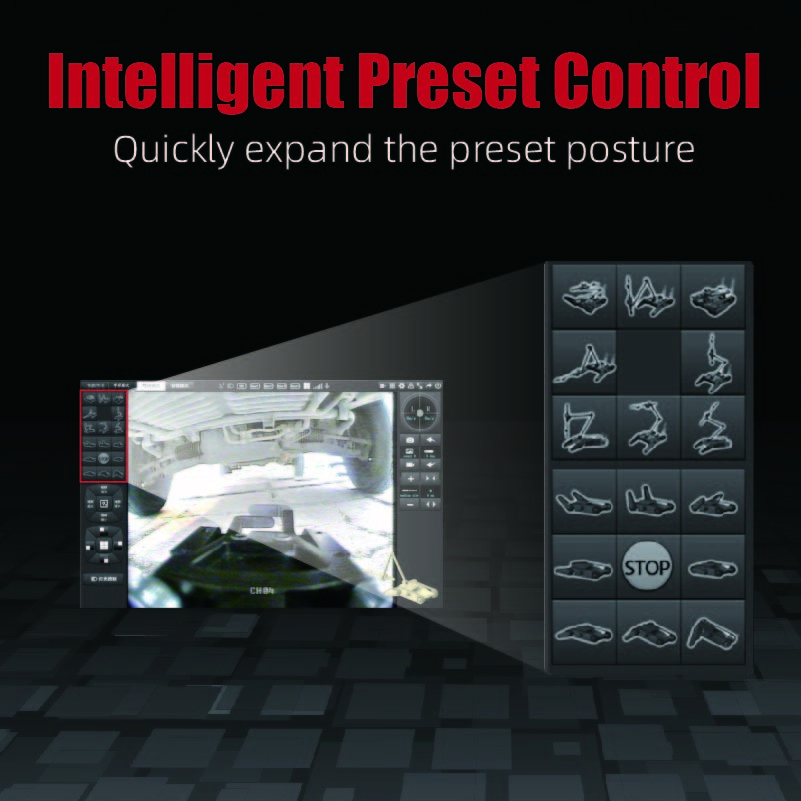
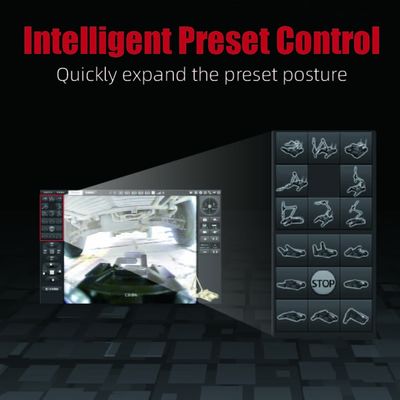
Интеллектуальный дизайн управления предустановленной позой — более простое и быстрое управление
Благодаря функции «Интеллектуальное управление предустановленной позой для общих задач» робот может «автоматически достигать предустановленной позиции одним щелчком мыши» в соответствии с потребностями пользователя. Эта функция значительно сокращает объем ручных операций, необходимых на месте, служа эффективным помощником для операторов на передовой и повышая надежность и безопасность задач по обезвреживанию бомб.
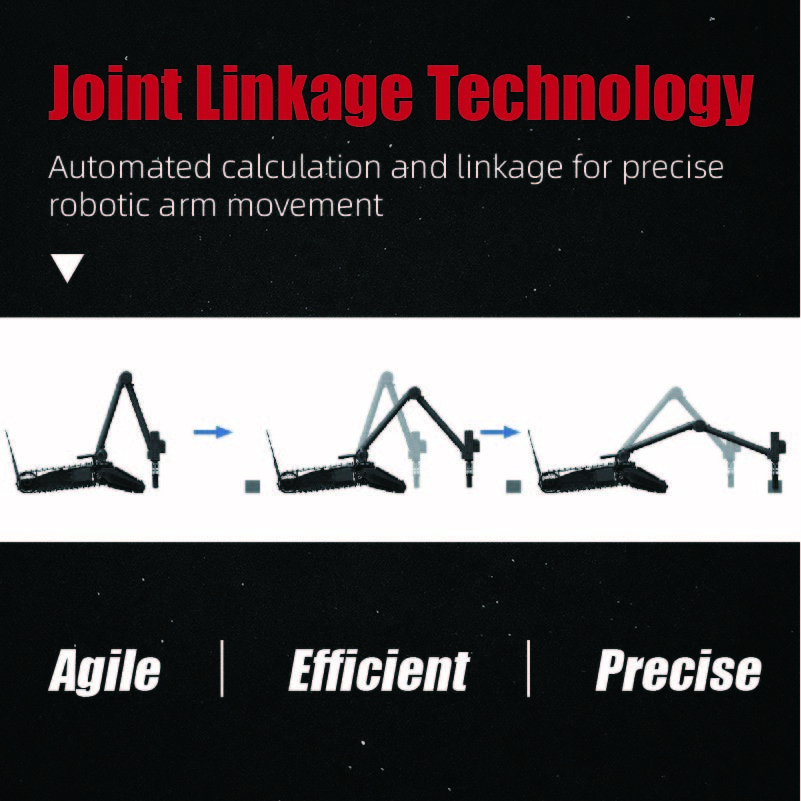
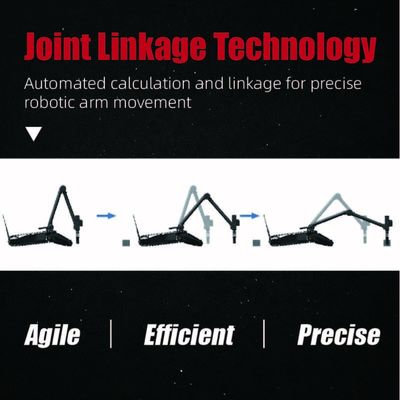
Технология сочленения «X-Y-Z» — более точное и эффективное управление
Дизайн управления технологией сочленения «X-Y-Z», основанный на автоматических вычислениях, также известный как «дизайн управления перемещением захвата на основе декартовых координат», преобразует традиционное «одношарнирное» управление роботами для обезвреживания бомб в «многошарнирное координированное» управление. Это значительно повышает эффективность и точность работы роботов для обезвреживания бомб. По сравнению с конструкцией управления «одношарнирным» управлением, она сокращает среднее время работы на 80%.
REOD450 достигает «управления перемещением захвата на основе декартовых координат» посредством автоматических вычислений. Для захвата подозрительных опасных предметов в горизонтальном одномерном пространстве он быстро управляет роботом для достижения «многошарнирного координированного движения» для одномерного перемещения захвата в пространстве. Это значительно снижает сложность работы и повышает точность, позволяя практически мгновенно позиционировать без необходимости повторных итераций.
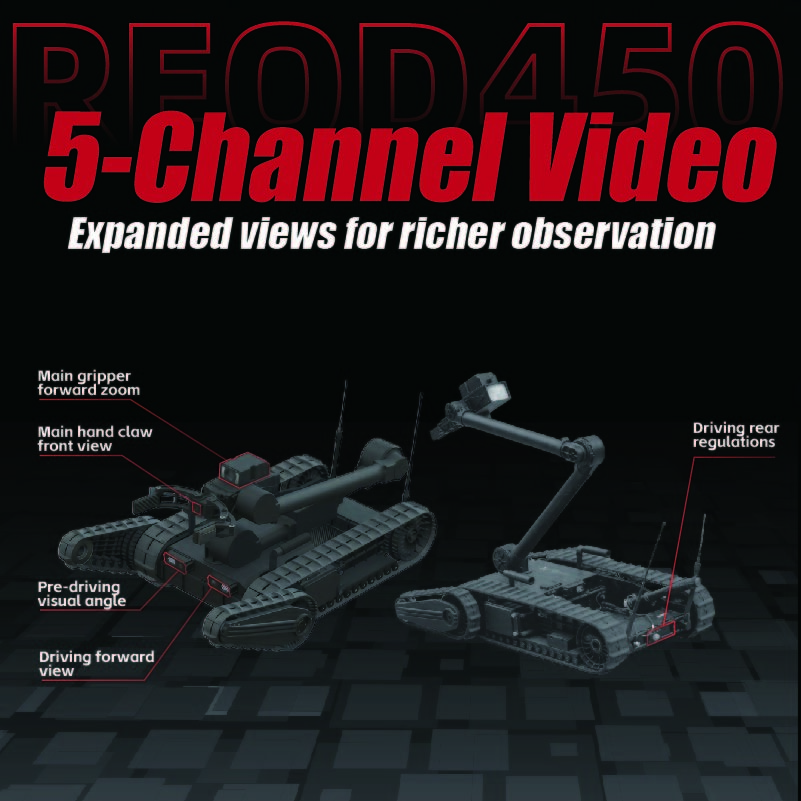
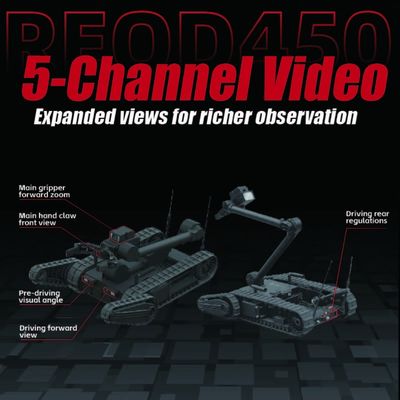
Система адаптивной визуализации — семь видов камер для расширенного наблюдения
Система визуализации робота действует как глаза оператора. REOD450 оснащен инновационной системой адаптивной визуализации с 7-камерной системой, значительно расширяющей возможности операторов на передовой по восприятию удаленной среды. Конструкция 7-камерной системы — это не простое расположение, а скорее улучшение и оптимизация на основе проблем, с которыми сталкиваются пользователи во время фактического использования.
Система визуализации обычно делится на три комбинации изображений: режим вождения, основной режим захвата и расширенный режим захвата. Она автоматически переключается между этими режимами в зависимости от типичных задач, таких как вождение, захват и наблюдение, обеспечивая более сильное удаленное восприятие окружающей среды и более широкий диапазон углов обзора.
Конструкция интегрированной роботизированной руки с восемью степенями свободы — более гибкое и безопасное управление
Роботизированная рука REOD450 имеет интегрированную конструкцию с 8 степенями свободы, обеспечивающую широкие возможности пространственного охвата. Эта конструкция позволяет роботизированной руке выполнять не только обычные задачи по обезвреживанию бомб, но и операции, с которыми не могут справиться обычные роботы для обезвреживания бомб с 5 или 6 степенями свободы, такие как захват объектов в высоких, низких, глубоких ямах или на столе, а также проведение многоугольной разведки в высоких, низких и глубоких ямах.
Универсальная система быстросменных инструментов
Робот REOD450 оснащен 18 типами «быстросменных инструментов», включая 6 наборов захватных инструментов, 6 основных наборов инструментов и 6 расширенных наборов инструментов, что позволяет быстро заменять «наборы захватных инструментов» в зависимости от различных оперативных задач и типов и форм различных опасных объектов, тем самым удовлетворяя разнообразные эксплуатационные потребности пользователей.
Приложения
Галерея изображений
Технические параметры
| Платформа робота | |
| Размер | ≤850×600×660 мм (в сложенном виде) |
| Вес | ≤50 кг (содержит два комплекта батарей) |
| Максимальная скорость | ≥ 1,8 м/с (5 передач, бесступенчатая) |
| Преодоление препятствий | ≥ 300 мм |
| Ширина преодолеваемой канавки | ≥ 400 мм |
| Преодоление подъемов | ≥45° |
| Подъем по лестнице | ≥45° |
| Срок службы батареи (нормальная температура) | ≥2 ч |
| Степень защиты IP | IP66 |
| Производительность захвата роботизированной руки | |
| Выдвинутое состояние | ≥8 кг |
| Втянутое состояние | ≥30 кг |
| Когти | 1 |
| Подвижные соединения | 8 |
| Максимальная высота наблюдения | ≥2400 мм |
| Максимальная высота захвата | ≥1700 мм(Главный захват),≥2000 мм(Вспомогательный захват) |
| Максимальное расстояние захвата | ≥1380 мм(Главный захват),≥1650 мм(Вспомогательный захват) |
| Максимальная ширина открытия захвата | ≥160 мм |
| Портативный контроллер | |
| Размер | ≤360×210×70 мм |
| Вес | ≤2 кг (без рюкзака) |
| Экран дисплея | 10,1'' ЖК-дисплей |
| Отображение видео | 7-канальный |
| Метод работы | Двухрежимная работа кнопочного переключателя и сенсорного экрана |
| Метод управления |
Кабельное управление ≥100 м (стандартный кабель), беспроводное управление ≥1000 м (на открытом воздухе) |
Порекомендованные продукты