





















Все продукты
-
Многофункциональное ручное инфракрасное ночное зрение
-
Робот для уничтожения взрывчатых боеприпасов
-
Миниатюрный разведывательный робот
-
Монокулярное цифровое ночное зрение
-
Цифровое устройство ночного видения
-
Антиснайпер
-
Портативный радар
-
Патрульный записывающий фонарик
-
Тактическое оборудование специальных операций
-
Объем винтовки
-
Дальномер лазера
-
Военная модель
-
тактическое снаряжение
-
Надувные приманки
X-Y-Z Трехмерный космический робот-рука





| Место происхождения | Китай |
|---|---|
| Фирменное наименование | Particle |
| Номер модели | REOD500 |
| Количество мин заказа | 1 |
| Цена | $205,761 |
| Условия оплаты | T/T |

Свяжитесь я бесплатно образцы и талоны.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Скайп: sales10@aixton.com
Если вы имеете любую заботу, то мы предусматриваем 24-часовую интерактивную справку.
xПодробная информация о продукте
| Рука манипулятора | Да, да. | X-Y-Z трехмерный дизайн космической роботизированной руки | помогает точно контролировать |
|---|---|---|---|
| Конструкция роботизированной руки с 8 степенями свободы | более гибкое управление | Операционная температура | -40°C+50°C |
| Поднимитесь по лестнице | ≥45° | Интеллектуальная конструкция предварительно настроенного управления | персонализированная установка рабочей позы |
| Размер робота | ≤950×650×650 мм ((полностью набитое) | Масса робота | ≤ 50 кг ((Содержит два комплекта батарей) |
| Максимальная скорость | ≥ 2 м/с ((5 передач, непрерывно изменяемый) | Преодоление препятствий | ≥400MM |
| Ширина канавки | ≥400MM | Степеничность | ≥45° |
| Глубина промывки | ≥200mm | Продолжительность работы батареи ((нормальная температура) | ≥3h |
| Длина руки | 2000 мм | Максимальный вес уловок | ≥ 40 кг |
| Когти | 2 | Подвижные суставы | 8 |
| Размер регулятора | ≤ 270 мм × 170 мм × 100 мм | Вес регулятора | ≤1,2 кг ((без рюкзака) |
| Экран управления | ЖК-дисплей 7" | Видео дисплей | Семь каналов, один из которых имеет функцию автоматического фокусирования и увеличения. |
| Способ работы | Двойной режим работы кнопок и сенсорного экрана | Метод контроля | Кабельное управление ≥100 м ((стандартный кабель), беспроводное управление ≥1000 м ((внешний) |
| Роботная платформа IP-класса | IP66 | Уровень IP руки | IP66 |
| Температура хранения | -45°C+60°C | ||
| Выделить | Трехмерный робот для удаления взрывчатых боеприпасов,Робот для удаления взрывчатых боеприпасов 7 каналов,IP66 робот для утилизации |
||
Характер продукции
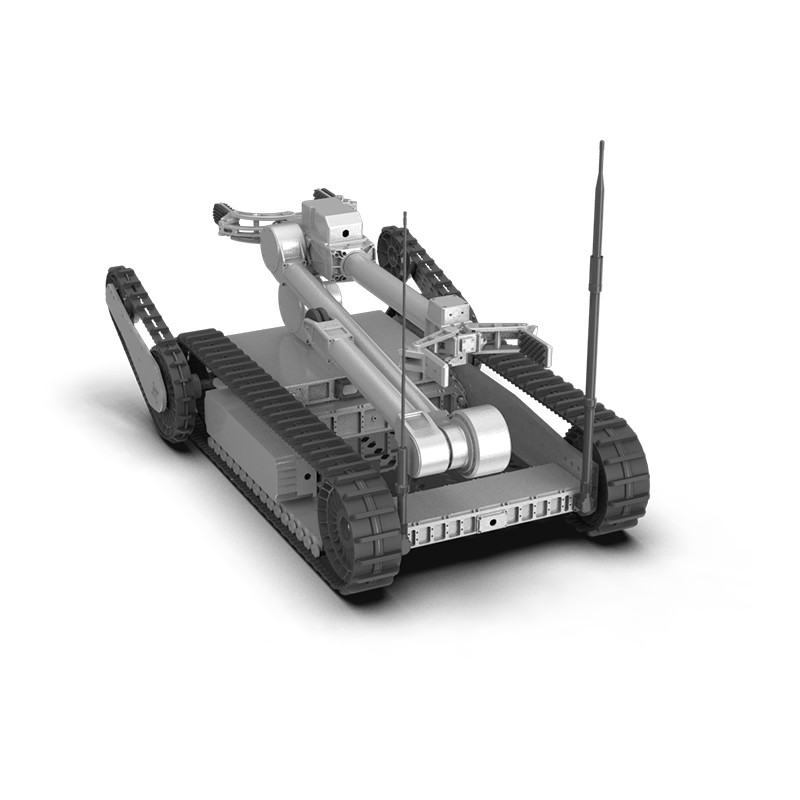
X-Y-Z Трехмерный космический робототехнический рукав Робот для уничтожения взрывчатых боеприпасов
|
Заявления JP REOD500, опираясь на инновационные принципы дизайна серии Hound, оснащен системой ползучего с подвижной рукой, которая интегрирует как главный ползучий, так и препятствующий ползучий с подвижной рукой.Эта уникальная комбинация значительно улучшает способность робота преодолевать препятствия, обеспечивая ему беспрецедентную мобильность и стабильность в сложных и опасных условиях, тем самым повышая безопасность и эффективность миссий ОВД.
Функциональность Дистанционное управление для приближения к опасному месту,Исследование потенциальных источников опасности,Принятие мер по ликвидации или передаче опасностей в соответствии с целями миссии,Защита работников линии фронта и населения от телесных повреждений.
Особенности 1Улучшенная конструкция механической руки, значительно улучшенные характеристики захвата; ★2. патентный дизайн "двух когтей", может решать несколько задач одновременно; 3. Графически двойной режим работы, удобный и надежный опыт работы; ★4. дистанционный 3D-дисплей в режиме реального времени, тонкая работа перед вашими глазами; ★5. Интеллектуальная конструкция управления "предварительными настройками", персонализированное регулирование рабочей позы; ★6. трехмерная конструкция "X-Y-Z" космической роботизированной руки, основанная на автоматическом вычислении, помогает вам точно управлять; 7. 7-канальные видеоизображения, более богатые перспективы наблюдения; 8. конструкция роботизированной руки с 8 степенями свободы, более гибкое управление; 9. Различные инструменты расширения могут быть быстро заменены для спокойного решения различных условий работы;
Технические параметры
REOD500 Подробности
|
Порекомендованные продукты