





















Все продукты
-
Многофункциональное ручное инфракрасное ночное зрение
-
Робот для уничтожения взрывчатых боеприпасов
-
Миниатюрный разведывательный робот
-
Монокулярное цифровое ночное зрение
-
Цифровое устройство ночного видения
-
Антиснайпер
-
Портативный радар
-
Патрульный записывающий фонарик
-
Тактическое оборудование специальных операций
-
Объем винтовки
-
Дальномер лазера
-
Военная модель
-
тактическое снаряжение
-
Надувные приманки
X-Y-Z Координативная роботизированная рука Средний размер робот EOD









| Место происхождения | Китай |
|---|---|
| Фирменное наименование | Particle |
| Номер модели | REOD500 |
| Количество мин заказа | 1 |
| Цена | $205,761 |
| Условия оплаты | T/T |

Свяжитесь я бесплатно образцы и талоны.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Скайп: sales10@aixton.com
Если вы имеете любую заботу, то мы предусматриваем 24-часовую интерактивную справку.
xПодробная информация о продукте
| Максимальная скорость | ≥ 2 м/с ((5 передач, непрерывно изменяемый) | Особые особенности | Взрывостойкость, водонепроницаемость, возможность дистанционного обезвреживания |
|---|---|---|---|
| Наименование продукта | Цели миссии Робот EOD Hound-III для мер по утилизации и передаче опасности | Особенности | 1. конструкция высокопрочной механической руки, обеспечивающая мощную производительность захвата;2. |
| Масса платформы робота | ≤ 350 кг ((содержит батареи); | Глубина прохода на платформе робота | ≥ 500 мм; |
| Заявления | Как реагировать на самодельные взрывные устройства | Размер платформы робота | 1600×850×1300 мм ((Полно уложенные); |
| Размер робота | ≤950×650×650 мм ((полностью набитое) | Масса робота | ≤ 50 кг ((Содержит два комплекта батарей) |
| Преодоление препятствий | ≥400MM | Ширина канавки | ≥400MM |
| Степеничность | ≥45° | Поднимитесь по лестнице | ≥45° |
| Глубина промывки | ≥200mm | Продолжительность работы батареи ((нормальная температура) | ≥3h |
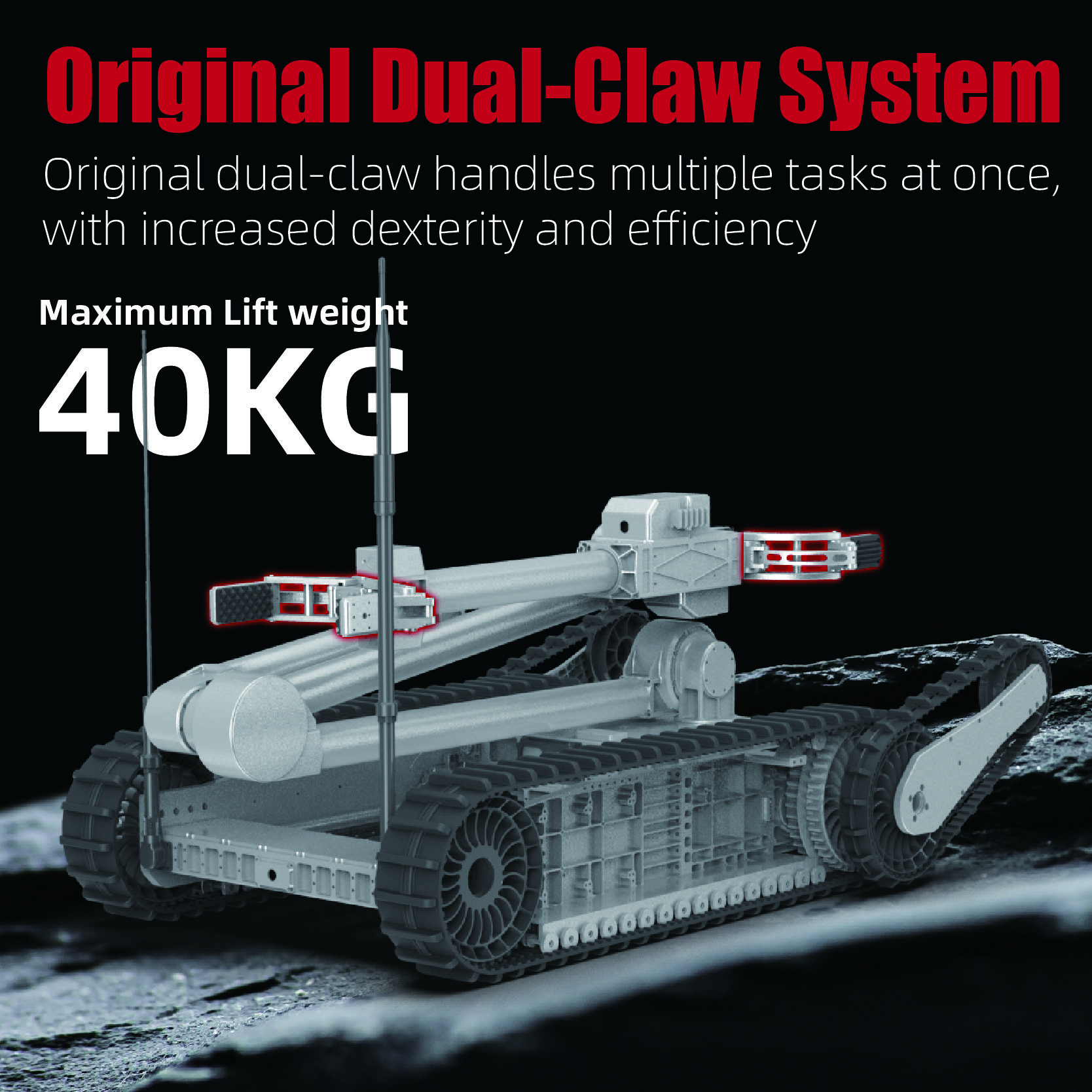
| Длина руки | 2000 мм | Максимальный вес уловок | ≥ 40 кг |
| Когти | 2 | Подвижные суставы | 8 |
| Размер регулятора | ≤ 270 мм × 170 мм × 100 мм | Вес регулятора | ≤1,2 кг ((без рюкзака) |
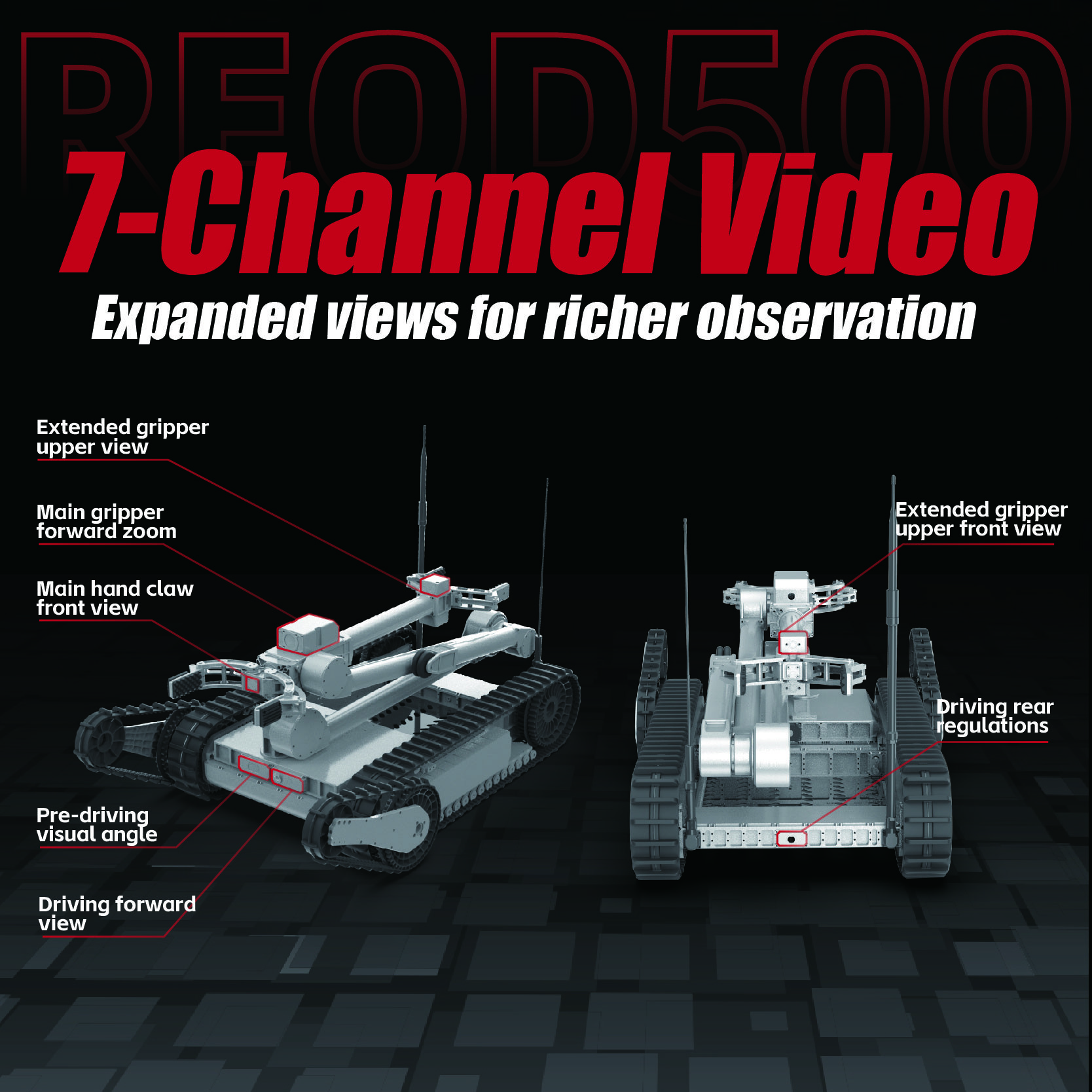
| Экран управления | ЖК-дисплей 7" | Видео дисплей | Семь каналов, один из которых имеет функцию автоматического фокусирования и увеличения. |
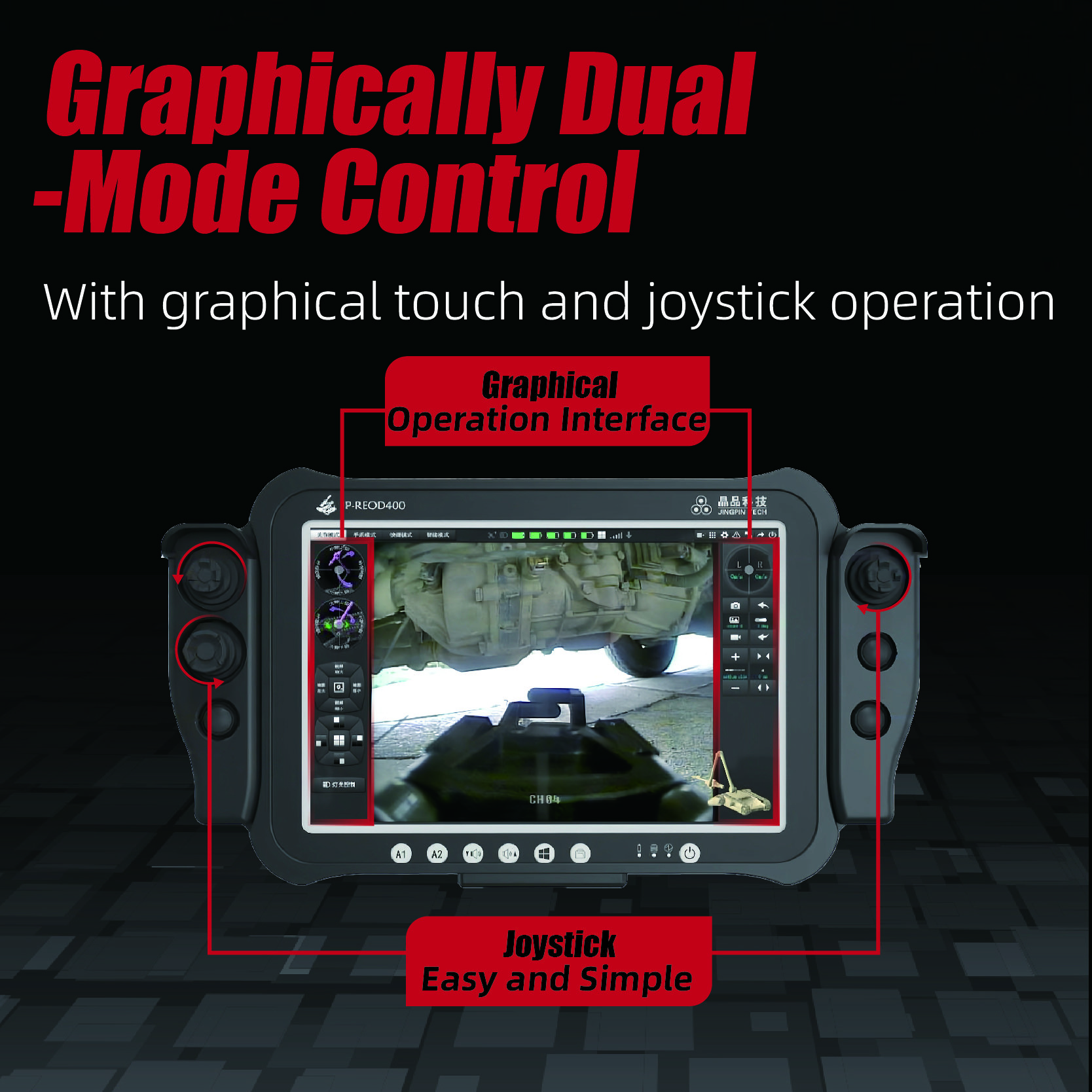
| Способ работы | Двойной режим работы кнопок и сенсорного экрана | Метод контроля | Кабельное управление ≥100 м ((стандартный кабель), беспроводное управление ≥1000 м ((внешний) |
| Роботная платформа IP-класса | IP66 | Уровень IP руки | IP66 |
| Операционная температура | -40°C+50°C | Температура хранения | -45°C+60°C |
| Выделить | Координационный роботизированный робот для уничтожения взрывчатых боеприпасов,Робот для удаления взрывчатых боеприпасов,Роботы IP66 |
||
Характер продукции
Продвинутые X-Y-Z Координаты Роботизированные Руки Производители Роботов Среднего Размера
Описание и особенности
Робот JP REOD500 EOD - это передовое решение для уничтожения взрывчатых боеприпасов (EOD) в условиях повышенного риска.оборудование с системой ползучего механизма с подвижной рукой, объединяющей главный ползучий механизм с механизмом препятствий с подвижной рукой, эта конструкция значительно улучшает возможности навигации робота через препятствия, обеспечивая надежную и надежную производительность в операциях EOD.Робот оснащен роботизированной рукой с несколькими степенями свободы, которая обеспечивает мощные возможности хватания и управления. JP REOD500 имеет размеры ≤900mm × 650mm × 500mm (полностью загруженный) и вес ≤42kg. Максимальная скорость ≥2,0m/s, просвет от препятствий ≥320mm,и способность к подъему и подъему по лестнице до 45°, обеспечивая превосходную маневренность в различных местностях.
Оборудованный манипулятором с 8-градусной свободой, JP REOD500 предлагает точное управление с максимальной высотой захвата ≥ 1800 мм (главный когти) и максимальным расстоянием захвата ≥ 1400 мм (главный когти).Робот поддерживает 7-канальный видеодисплей, обеспечивающий более богатые перспективы наблюдения, и имеет возможности дистанционного отображения 3D-позы в режиме реального времени.IP67 для защиты от пыли и воды, и методы управления, которые включают кабельное управление до 120 м и беспроводное управление до 1200 м, JP REOD500 построен для надежности и универсальности в сложных условиях.предлагает опции настройки OEM и ODM для удовлетворения конкретных операционных потребностей.
Улучшенная конструкция механического рукава
JP REOD500 имеет усовершенствованную конструкцию механической руки, которая значительно улучшает его возможности захвата.Благодаря этой усовершенствованной конструкции робот с большей точностью и прочностью обрабатывает различные опасные предметы., повышая общую эффективность операций по ОВД.
Инновационный патентный дизайн "двух когтей"
Патентованная конструкция "двух когтей" позволяет JP REOD500 решать несколько задач одновременно.например, хватать за предметы, открывая двери или выполняя другие вспомогательные задачи, что делает его очень эффективным для миссий EOD.
Графическая работа в двух режимах
Графическая двойная операция обеспечивает пользователям интуитивно понятный интерфейс для управления роботом.обеспечение простоты использования и надежности в условиях повышенного стрессаЭта конструкция исключает необходимость запоминания сложных функций кнопок пользователями, сокращая время обучения и повышая эффективность работы.
Удаленное 3D-дисплей в реальном времени ️ Прекрасная операция перед вашими глазами
JP REOD500 использует передовую технологию виртуального 3D-дисплея для обратной связи в режиме реального времени о состоянии робота.обеспечивая интуитивное и подробное понимание позиционирования и окружения робота, даже если он работает за линией зрения.
Интеллектуальный дизайн предварительно настроенного управления
Интеллектуальная конструкция управления "предварительным настроением" позволяет JP REOD500 автоматически достигать заданных позиций одним щелчком мыши, в зависимости от потребностей пользователя.сокращение количества требуемого ручного вмешательства и обеспечение быстрого и надежного выполнения задач.
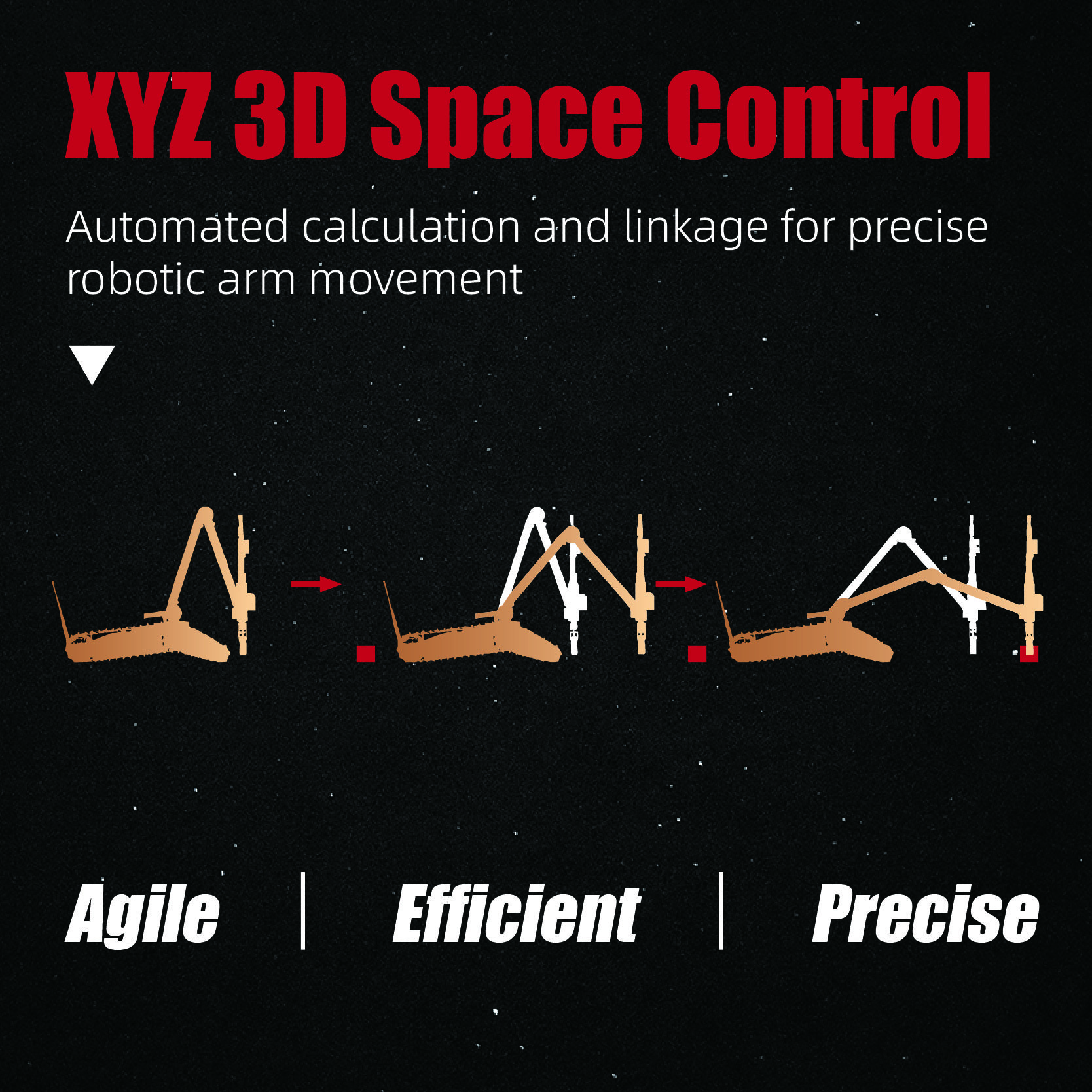
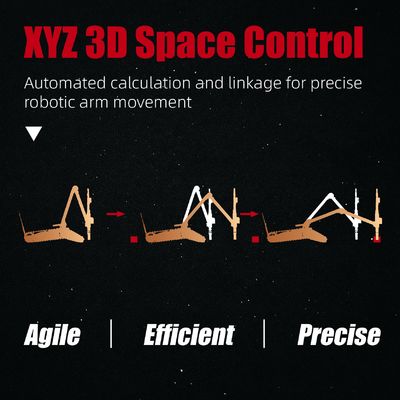
"X-Y-Z" Трехмерное пространство Роботизированное рукоятное соединение дизайн
JP REOD500 использует трехмерную конструкцию "X-Y-Z" роботизированного объединения рук, основанную на автоматическом вычислении, обеспечивающую точный контроль над движениями робота.Эта конструкция повышает эффективность и точность работ по уничтожению бомб, сокращая среднее время работы до 80% по сравнению с традиционным управлением одним суставом.
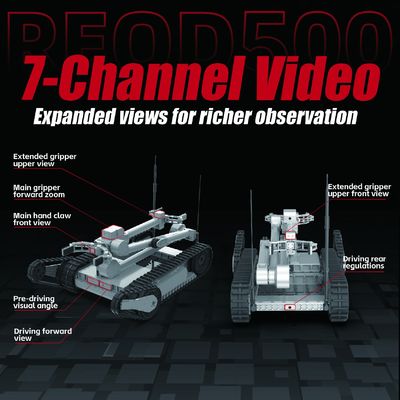
Семиканальная видеосистема с более широкими возможностями наблюдения
Оснащенная 7-канальной видеосистемой, JP REOD500 обеспечивает множество углов наблюдения для повышения осведомленности о ситуации.режим первичного захвата, и режим вспомогательного захвата, адаптирующийся к эксплуатационному контексту для оптимального просмотра.
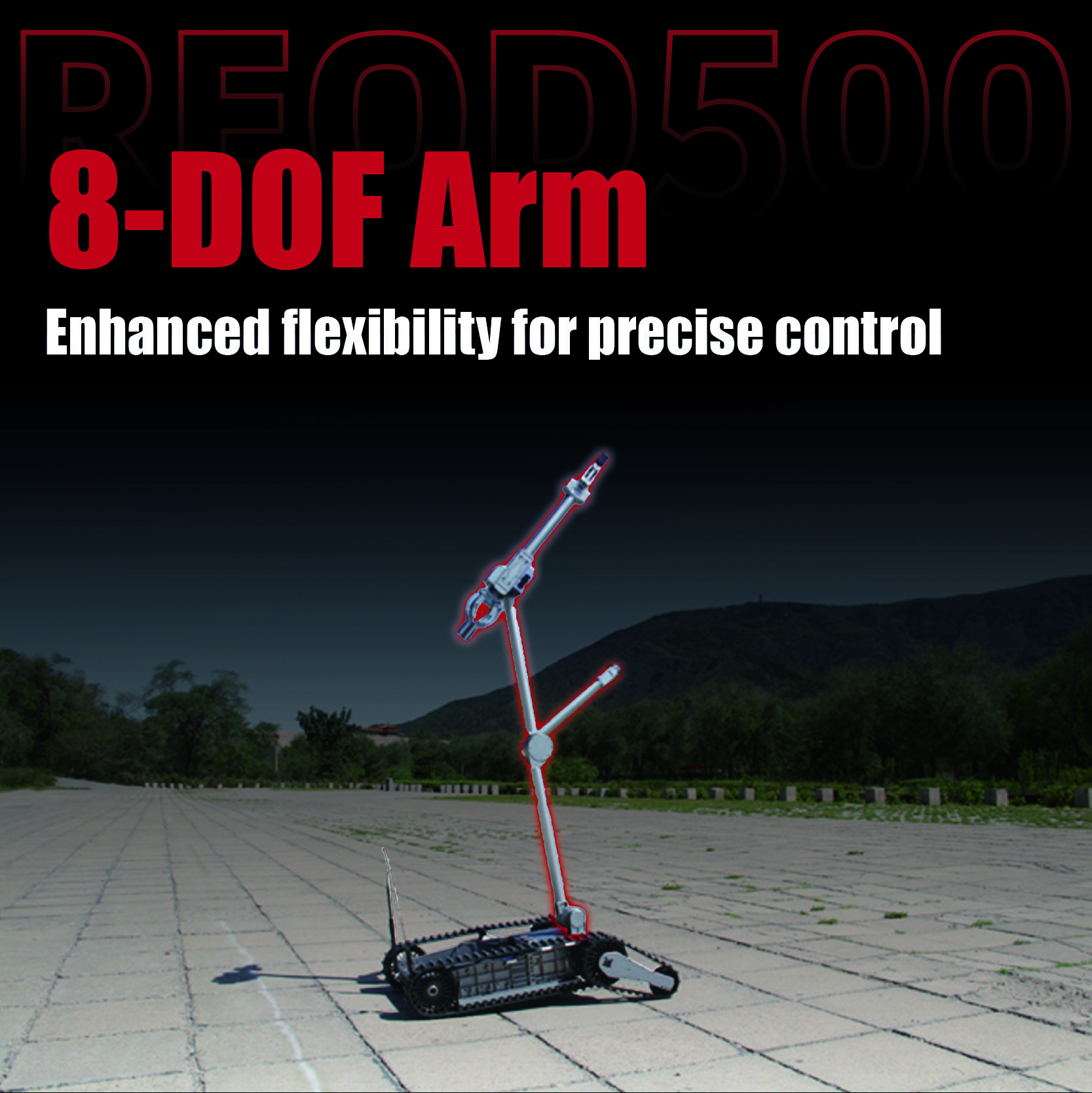
Проектирование роботизированной руки с 8-ю степенями свободы с более гибким управлением
Дизайн роботизированной руки с 8-градусной свободой дает JP REOD500 сильные возможности пространственного охвата, позволяя ему выполнять задачи в высокой, низкой, глубокой яме или на столе.Эта гибкость делает его подходящим для широкого спектра операций EOD, которые требуют точности и адаптивности.
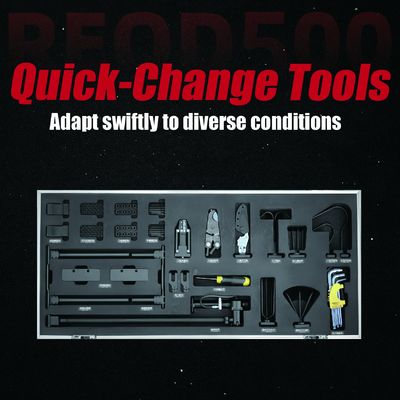
Многофункциональная система быстрой смены инструментов ∙ адаптируемая к различным условиям работы
JP REOD500 оснащен универсальной системой инструментов для быстрой смены, включающей несколько наборов инструментов для захвата, базовые наборы инструментов и расширенные наборы инструментов.Эти инструменты могут быть быстро заменены на основе конкретных эксплуатационных требований, что позволяет роботу легко адаптироваться к различным условиям труда и эффективно справляться с различными видами опасностей.
Заявления
Галерея изображений
Технические параметры
| Платформа робота | |
|
Размер |
≤950×650×650 мм ((полностью набитое) |
|
Вес |
≤ 50 кг ((содержит два комплекта батарей) |
|
Максимальная скорость |
≥2m/s ((5 передач, непрерывно изменяемый) |
|
Преодоление препятствий |
≥ 400 мм |
|
Ширина канавки |
≥ 400 мм |
|
Степеничность |
≥ 45° |
|
Поднимитесь по лестнице |
≥ 45° |
|
Глубина промывания |
≥ 200 мм |
|
Время автономной работы ((нормальная температура) |
≥ 3 ч |
|
Продуктивность захвата роботизированной руки |
|
|
Длина руки |
2000 мм |
|
Максимальный вес уловок |
≥ 40 кг |
|
Крылья |
2 |
|
Подвижные суставы |
8 |
|
Портативный контроллер |
|
|
Размер |
≤ 270 мм × 170 мм × 100 мм |
|
Вес |
≤1,2 кг ((без рюкзака) |
|
Экран отображения |
ЖК-дисплей 7" |
|
Видео дисплей |
Семь каналов, один из которых имеет функцию автоматического фокусирования и увеличения. |
|
Метод работы |
Двухрежимная работа клавиатуры и сенсорного экрана |
|
Метод контроля |
Кабельное управление ≥100 м ((стандартный кабель), беспроводное управление ≥1000 м ((внешний) |
|
Уровень защиты и адаптивность к окружающей среде |
|
|
Платформа робота |
IP66 |
|
Рука |
IP66 |
|
Операционная температура |
-40°C+50°C |
|
Температура хранения |
-45°C+60°C |
Свяжитесь с нами
Мисс Эми
По электронной почте:amy-huang@mysmech.com
Порекомендованные продукты