





















Все продукты
-
Многофункциональное ручное инфракрасное ночное зрение
-
Робот для уничтожения взрывчатых боеприпасов
-
Миниатюрный разведывательный робот
-
Монокулярное цифровое ночное зрение
-
Цифровое устройство ночного видения
-
Антиснайпер
-
Портативный радар
-
Патрульный записывающий фонарик
-
Тактическое оборудование специальных операций
-
Объем винтовки
-
Дальномер лазера
-
Военная модель
-
тактическое снаряжение
-
Надувные приманки
Многофункциональный компактный робот для уничтожения бомб







| Место происхождения | Китай |
|---|---|
| Фирменное наименование | Particle |
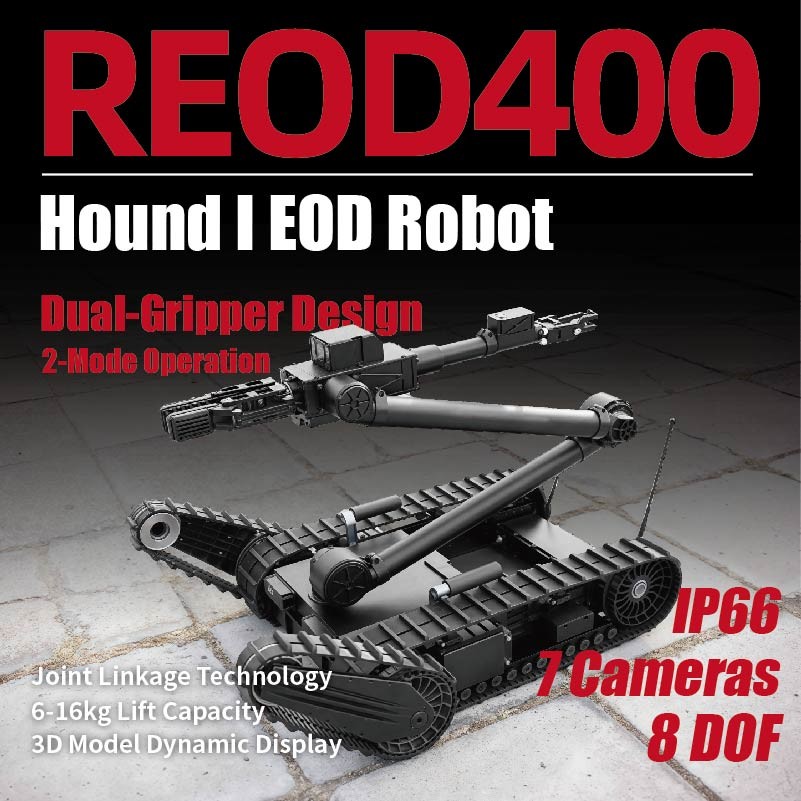
| Номер модели | REOD400 |
| Цена | $17,000 |

Свяжитесь я бесплатно образцы и талоны.
WhatsApp:0086 18588475571
Wechat: 0086 18588475571
Скайп: sales10@aixton.com
Если вы имеете любую заботу, то мы предусматриваем 24-часовую интерактивную справку.
xПодробная информация о продукте
| Ночное видение | Да | Разрешение | Высокий |
|---|---|---|---|
| Функция | Многофункциональный | Зрение | Ночное видение |
| Долговечность | Прочный | Масса | ≤ 37 кг ((Содержит два комплекта батарей) |
| Рабочее время (температура в помещении) | ≥2H | Рабочая температура | -40℃~+50℃ |
| IP-класс | IP66 | Размер | ≤ 830 мм × 600 мм × 460 мм ((полностью набитое) |
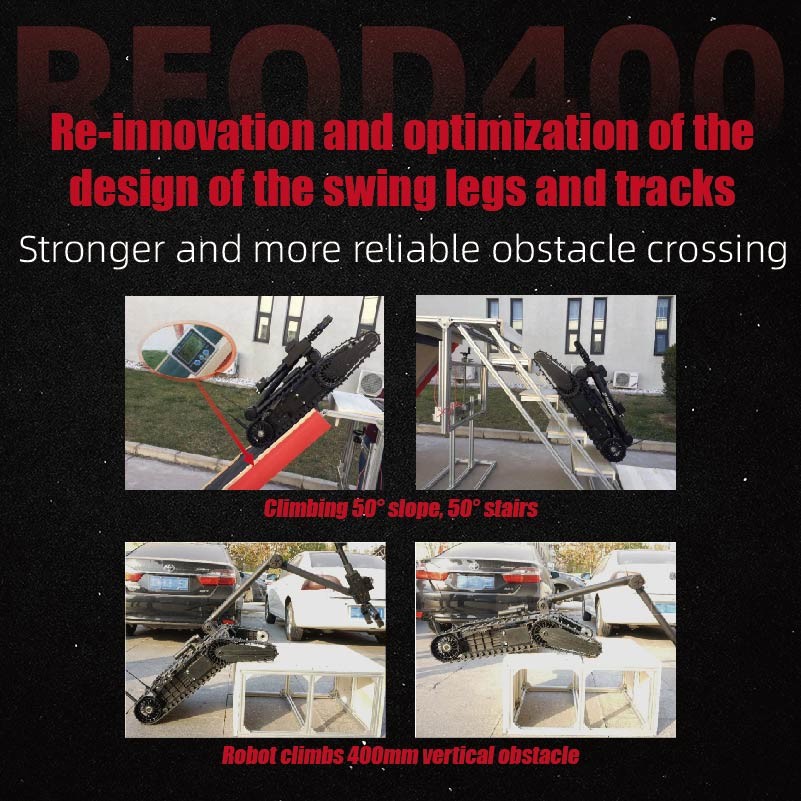
| Преодоление препятствий | ≥300mm | Градиативность | ≥45° |
| Подвижные суставы | 8 | Максимальная ширина открытия крепления | ≥160mm |
| Метод работы | Двойной режим работы кнопок и сенсорного экрана | Продолжительность работы батареи ((нормальная температура) | ≥2H |
| Ширина канавки | ≥400MM | Поднимитесь по лестнице | ≥45° |
| Наибольшее расстояние захвата | ≥ 1650 мм | Подъем | 6-16 кг |
| Метод управления | Кабельное управление ≥100 м ((стандартный кабель), беспроводное управление ≥1000 м ((внешний) | ||
| Выделить | Многофункциональные инфракрасные ночные очки,Инфракрасные очки ночного видения с высокой разрешением,Ручные тепловизоры |
||
Характер продукции
Удаление легких взрывчатых боеприпасов EOD робот Hound-I
Описание и особенности
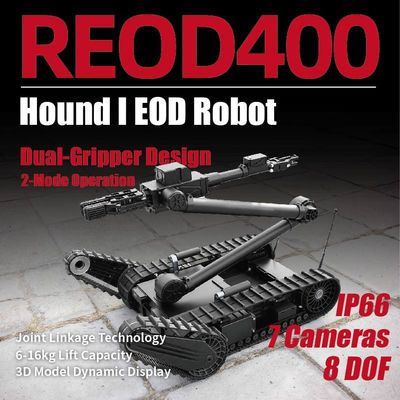
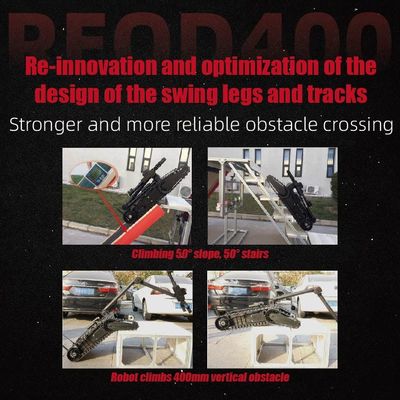
Робот REOD400 EOD представляет собой передовое решение для удаления взрывчатых боеприпасов (EOD) в условиях повышенного риска.что делает его высокоэффективным для таких операций, как борьба с терроризмом в городахРобот является компактным и легким, с размерами ≤830 мм × 600 мм × 460 мм (полностью заправленный) и весом ≤37 кг.Максимальная скорость ≥ 10,8 м/с с 5 передачами и непрерывным переменным приводом, расстояние от препятствий ≥ 300 мм и способность к подъему и подъему по лестнице до 45°,обеспечение превосходной маневренности и адаптивности в различных местностях.
Оснащенный 8-градусной свободойМанипулятор, REOD400 обеспечивает точное управление с максимальной высотой захвата ≥1700 мм (основной когти) и максимальным расстоянием захвата ≥1380 мм (основной когти).позволяет более богатые перспективы наблюденийС длительностью работы батареи ≥ 2 часа при нормальной температуре, рейтингом IP66 для пыли и водостойкости,и методы управления, включающие кабельное управление до 100 м и беспроводное управление до 1000 мКроме того, он предлагает опции настройки OEM и ODM для удовлетворения конкретных операционных потребностей.
Инновационный дизайн "двойной захватчики" повышает гибкость и целесообразность выполнения задач
Инновационная конструкция "Dual Gripper" оснащена роботизированной рукой, оснащенной как "первичным захватывающим когтом", так и "многофункциональным удлинительным когтом".Эта конструкция значительно улучшает гибкость и целесообразность выполнения роботом задач, обеспечивая эффективную поддержку выполнения различных задач в рамках одной операции.Конструкция "двойной крепкой" эффективно устраняет ограничения традиционных роботов-разрушителей бомб, которые имеют только "один креп"., "который не может одновременно выполнять такие задачи, как "хватка опасных предметов" и "открытие дверей, резка, зажимание, разрыв, крючок и другие вспомогательные действия".Он может выполнять такие задачи, как "открыть дверь и схватить предмет за один раз". "
Дизайн "двойного захвата" успешно освобождает "основной захватный когти" от выполнения других функций, кроме захвата, тем самым значительно повышая захватные возможности робота.Первичный когти могут схватить подозрительные опасные предметы весом 6-16 кг, с хваткой шириной до 160 мм и максимальной силой зажима 300 Н. Кроме того, в зависимости от конкретных операционных задач,"Набор инструментов для сцепления" может быть быстро заменен для обработки различных типов и форм опасных предметов..
Поддержка сенсорного / джойстик управления ¦ Более удобное взаимодействие и надежная работа
Дизайн работы графического сенсорного управления / джойстика в настоящее время является ведущим решением управления роботом для удаления бомб на международном уровне.Он был высоко признан пользователями для его более удобного взаимодействия и надежной работыОсновными его особенностями являются:
- Дизайн графической операции:Все операции выполняются графически, что исключает необходимость запоминания сложных функций кнопок и операционных протоколов.Этот удобный интерфейс делает работу простой и интуитивно понятной, что значительно сокращает время обучения.
- Дизайн работы управления с помощью сенсорного устройства / джойстика:Для выполнения всех операций робота можно использовать как кнопки джойстика, так и сенсорный экран.Избыточность, обеспечиваемая этими двумя методами работы, не только повышает надежность системы, но и повышает эффективность работы путем сочетания кнопок джойстика с сенсорными экранами управления.
|
|
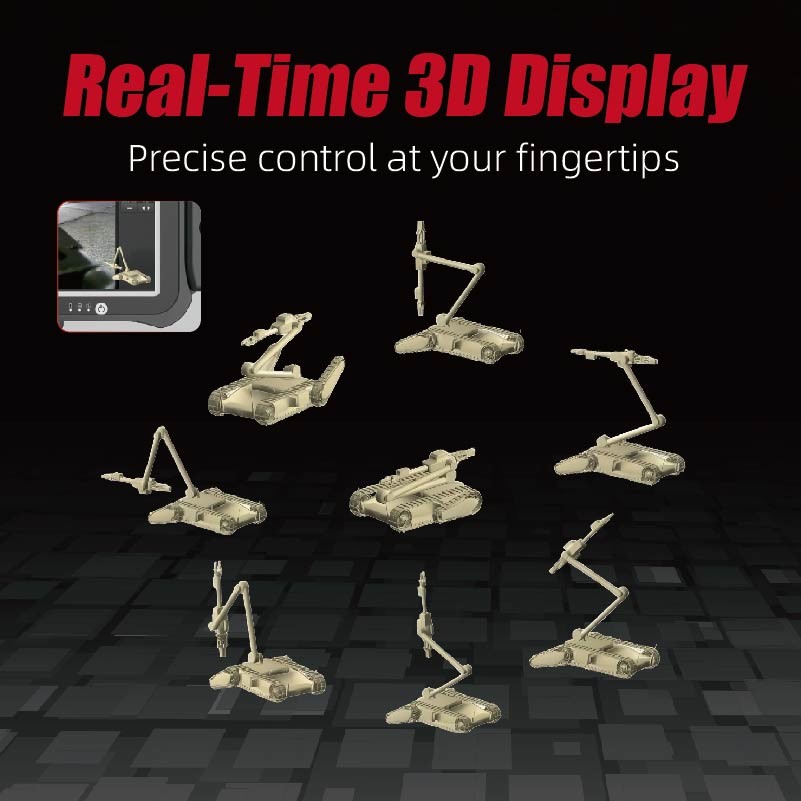
Удаленный 3D дисплей в режиме реального времени вблизи рук, более интуитивная работа
Поскольку роботы-разрушители бомб часто работают за горизонтом во время выполнения заданий, операторы должны получать информацию в режиме реального времени о углах и пространственных положениях суставов робота. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusЭто дает роботу ощущение "близости" даже когда он "далеко", что позволяет более интуитивно работать.
Основные особенности дистанционного 3D-дисплея в реальном времени следующие:
- Отображение 3D-статуса робота в режиме реального времени
- Наблюдение за 3D-состоянием робота под разными углами
- Увеличение и уменьшение 3D-статуса робота
Ручной контроллер робота воспроизводит удаленный 3D-статус робота, что позволяет увеличивать, уменьшать и наблюдать за 3D-моделью под любым углом.
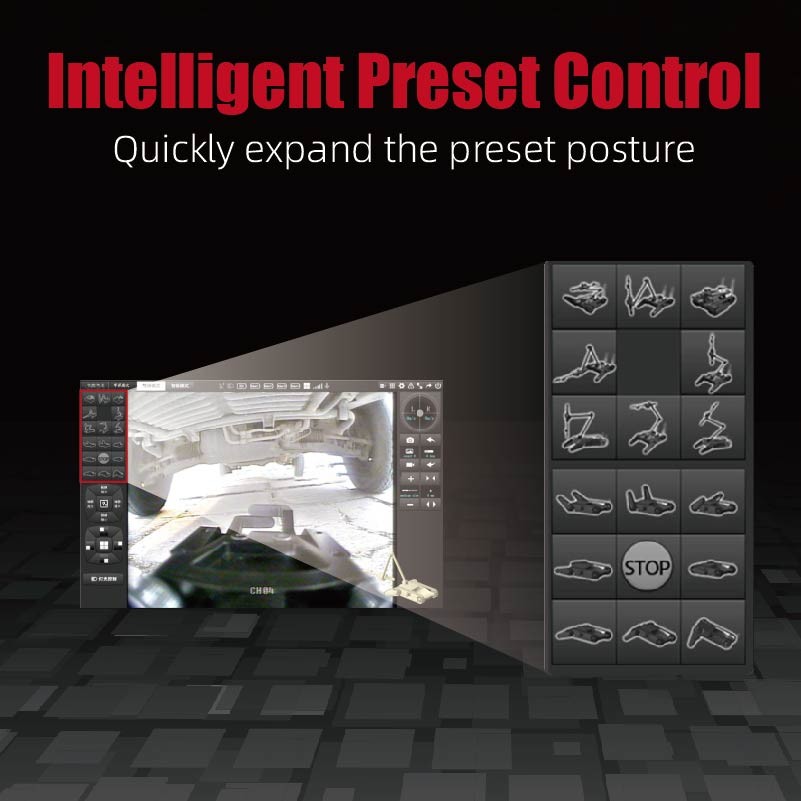
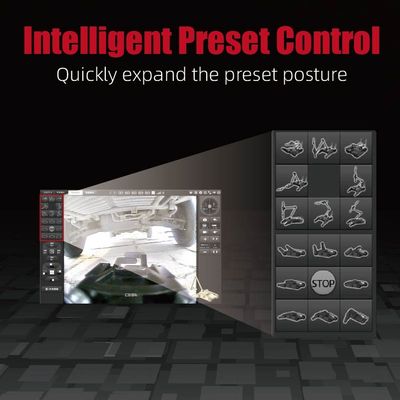
Интеллектуальная система управления предварительно настроенным положением тела
С помощью "Интеллектуального управления предварительно настроенным положением для выполнения обычных задач" робот может "автоматически достичь заранее установленного положения одним щелчком мыши" в зависимости от потребностей пользователя.Эта функция значительно сокращает количество ручной работы, необходимой на месте, служит эффективным помощником операторов на передовой линии и повышает надежность и безопасность работ по уничтожению бомб.
"X-Y-Z" технология соединительного соединения более точный и эффективный контроль
Проектирование работы технологии соединения соединений X-Y-Z на основе автоматического вычисления, также известное как "проектирование управления переводом сцепления на основе картезианских координат," преобразует традиционное "односочленное" управление роботами-разрушителями бомб в "многосочленное координированное управление"Это значительно повышает эффективность и точность работы роботов-разрушителей бомб. По сравнению с конструкцией управления "односоединением" оно сокращает среднее время работы на 80%.
Для захвата подозрительных опасных предметов в горизонтальном одномерном пространствеОн быстро управляет роботом, чтобы достичь "многосочлененного скоординированного движения" для одномерного пространства сцепления переводаЭто значительно уменьшает трудности эксплуатации и повышает точность, позволяя практически немедленное позиционирование без необходимости повторных итераций.
Система визуализации с адаптивным режимом
Система обработки изображений робота действует как глаза оператора.значительное улучшение способности операторов первой очереди воспринимать удаленную средуПроектирование системы с 7 камерами - это не простое устройство, а скорее улучшение и оптимизация, основанные на проблемах, с которыми сталкиваются пользователи во время фактического использования.
Система визуализации обычно делится на три комбинации изображений: режим вождения, режим первичного захвата и режим расширенного захвата.Он автоматически переключается между этими режимами на основе типичных задач, таких как вождение, захватывающий и наблюдающий, предлагающий более сильное отдаленное окружающее сознание и более богатый диапазон углов наблюдения.
Проектирование интегрированной роботизированной руки с восемью степенями свободы более гибкое и безопасное управление
Роботизированная рука REOD400 имеет 8-градусную интегральную конструкцию, обеспечивающую мощный пространственный охват.Эта конструкция позволяет роботизированной руке выполнять не только обычные задачи по уничтожению бомб, но и операции, которые обычные роботы с 5-градусной или 6-градусной свободой не могут справиться, такие как захват объектов в высокой, низкой, глубокой яме или на столе, а также проведение многоугольной разведки в высокой, низкой и глубокой яме.
Многофункциональная система быстрой замены инструментов
Робот REOD400 оснащен 18 типами "быстрых инструментов", включая 6 наборов инструментов для захвата, 6 базовых наборов инструментов и 6 расширенных наборов инструментов,позволяет быстро заменять "комплекты захватывающих инструментов" на основе различных операционных задач и типов и форм различных опасных предметов, тем самым удовлетворяя разнообразные эксплуатационные потребности пользователей.
Заявления
Галерея изображений
Технические параметры
| Платформа робота | |
| Размер | ≤ 830×600×460 мм ((полностью набитое) |
| Вес | ≤ 37 кг (содержит два комплекта батарей) |
| Максимальная скорость | ≥ 1,8 м/с ((5 передач, непрерывно изменяемый) |
| Преодоление препятствий | ≥300 мм |
| Ширина канавки | ≥ 400 мм |
| Степеничность | ≥ 45° |
| Поднимитесь по лестнице | ≥ 45° |
| Время автономной работы ((нормальная температура) | ≥ 2 часа |
| Степень IP | IP66 |
| Продуктивность захвата роботизированной руки | |
| Расширенное состояние | ≥ 6 кг |
| Снятое государство | ≥ 16 кг |
| Крылья | 2 |
| Подвижные суставы | 8 |
| Максимальная высота наблюдения | ≥2400 мм |
| Максимальная высота хватания | ≥1700 мм(Главный конец),≥2000 мм(Вице-клавер) |
| Наибольшее расстояние захвата | ≥1380 мм(Главный конец),≥ 1650 мм(Вице-клавер) |
| Максимальная ширина открытия сцепки | ≥160 мм |
| Портативный контроллер | |
| Размер | ≤360×210×70 мм |
| Вес | ≤ 2 кг ((без рюкзака) |
| Экран отображения | 10.1'' LCD |
| Видео дисплей | 7 каналов |
| Метод работы | Двухрежимная работа клавиатуры и сенсорного экрана |
| Метод контроля | Кабельное управление ≥100 м ((стандартный кабель), беспроводное управление ≥1000 м ((внешний) |
Свяжитесь с нами
Мисс Эми
WhatsApp: +86 13621280280
Порекомендованные продукты